 |
pinocchio 4.0.0
A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives
|


| |
|
pinocchio 4.0.0
A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives
|
|
| |
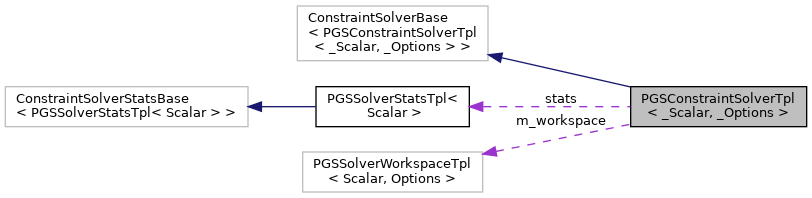
Projected Gauss Siedel solver. More...
#include <pinocchio/algorithm/solvers/pgs-solver.hpp>
Public Types | |
| typedef ConstraintSolverBase< Self > | Base |
| typedef PGSSolverResultTpl< Scalar, Options > | PGSSolverResult |
| typedef PGSSolverSettingsTpl< Scalar > | PGSSolverSettings |
| typedef PGSSolverStatsTpl< Scalar > | PGSSolverStats |
| typedef internal::PGSSolverWorkspaceTpl< Scalar, Options > | PGSSolverWorkspace |
| typedef Eigen::Ref< const VectorXs > | RefConstVectorXs |
| typedef _Scalar | Scalar |
| typedef PGSConstraintSolverTpl | Self |
| typedef Eigen::Matrix< Scalar, Eigen::Dynamic, 1, Options > | VectorXs |
Public Member Functions | |
| PGSConstraintSolverTpl (std::size_t max_problem_size=0) | |
| Default constructor. More... | |
| bool | isValid () const |
| Returns true if solver is in a valid state (it has solved a constraint problem). If so, its stats are valid. | |
| void | resetImpl () |
| template<typename DelassusDerived , typename VectorLike , typename ConstraintModel , typename ConstraintModelAllocator , typename ConstraintData , typename ConstraintDataAllocator > | |
| bool | solveImpl (DelassusOperatorBase< DelassusDerived > &delassus, const Eigen::MatrixBase< VectorLike > &g, const std::vector< ConstraintModel, ConstraintModelAllocator > &constraint_models, const std::vector< ConstraintData, ConstraintDataAllocator > &constraint_datas, const PGSSolverSettings &settings, PGSSolverResult &result) |
Public Attributes | |
| PGSSolverStats | stats |
| Per-iteration stats of the PGS solver. | |
Static Public Attributes | |
| static constexpr int | Options = _Options |
Protected Attributes | |
| bool | m_is_valid |
| Flag to check whether or not the solver is in a reset state. If not, its stats are valid. | |
| PGSSolverWorkspace | m_workspace |
| Workspace of the PGS solver. This is an internal of the solver and is not meant to be accessed by users. | |
Projected Gauss Siedel solver.
Definition at line 58 of file pgs-solver.hpp.
|
inlineexplicit |
Default constructor.
max_problem_size to preallocate maximum problem sizes data. This is optional and the solver will automatically resize its workspace to handle the constraint problem thrown at it. If the solver encounters a problem which size is bigger than max_problem_size, it will automatically resize its internals as well as the result output of solve.| [in] | max_problem_size | maximum problem size (before automatic reallocation) |
Definition at line 84 of file pgs-solver.hpp.